Dr. Jorge Martin Caliva, Dra. Jackelyn Melissa Kembro y Dr. Raúl Héctor Marín. Instituto de Investigaciones Biológicas y tecnológicas (IIByT-CONICET-UNC) e Instituto de Ciencia y Tecnología de los alimentos (FCEFyN–UNC), Argentina.
Resumen del trabajo presentado en el 46o Congreso Argentino de Producción Animal.
Introducción
Se estima que alrededor de 35.000 millones de aves son criadas y faenadas anualmente para consumo humano y Argentina es uno de los principales productores y exportadores de carne de ave. Por lo tanto, queda claro que un gran desafío de los investigadores de la ciencia avícola es el de brindar herramientas
para mejorar cantidad y calidad de los productos. En este marco, considerar el bienestar de estos animales de cría se ha convertido en una prioridad mundial como resultado de la creciente concientización de los consumidores y las demandas diferenciales de los mercados. La prioridad es tal que en numerosos países nuevas leyes y campañas obligan a las empresas a adaptar sus producciones en cortos plazos de tiempo.
En Argentina, el SENASA (2022) manifiesta que las buenas prácticas en bienestar animal no son un requisito más a cumplir impuesto por mercados externos e internos, sino una herramienta más dentro de las cadenas de valor que tienen como fin promover la calidad e inocuidad de los productos.
Los problemas de bienestar en los pollos de engorde (parrilleros) se encuentran principalmente asociados a su crecimiento acelerado, una alta densidad durante la cría y a la falta de enriquecimiento ambiental (Bienestaranimal.eu, 2011). En tan sólo 42 días se produce un incremento desde aproximadamente 50 gr al nacer hasta más de 3 kg, que sumado a un espacio reducido para moverse y a un ambiente carente de estímulos que fomenten comportamientos más allá del de comer, beber y descansar, conlleva a importantes problemas desórdenes asociados al desarrollo de los huesos largos (Santos et al., 2022). Es sabido que un factor clave para mejorar la salud del sistema óseo (y muscular asociado) en las aves es mantenerlos activos físicamente (Shipov et al., 2010).
En avicultura la aplicación de robótica se presenta con gran potencial principalmente en la producción de parrilleros ya que son criados a piso durante todo el ciclo productivo. En nuestro país, la empresa Appelie Robotics ha desarrollado recientemente (y sigue perfeccionamiento) un robot “AviSense” capaz de monitorear la temperatura y humedad del galpón desplazándose a través de transectas. Interesantemente, mientras se toman estos registros, el desplazamiento del robot fomenta que las aves se desplacen de sus posiciones cuasi estáticas y El objetivo principal de este trabajo es evaluar si el desplazamiento del robot durante el recorrido de la nave induce un mejoramiento en la actividad locomotora de las aves a lo largo de su vida (y que no sean asociados a comportamientos de huida o pánico).
Materiales y Métodos

Se evaluó en simultáneo dos naves de cría de pollos parrilleros, con la misma distribución de sexos, de 200 x 15 m, divididos en 4 fracciones de igual tamaño. En 2 fracciones de cada nave, los robots AviSense se desplazaron siguiendo transectas. Los recorridos se realizaron durante las horas de luz del día, comenzando en la primera semana del alojamiento de los pichones y continuando hasta la 5ta semana
de cría. Las otras dos fracciones de cada galpón se mantuvieron sin intervención. El experimento se repitió en una nueva tanda de animales invirtiendo las fracciones de la nave recorridas por el robot. Se realizaron registros de videos.
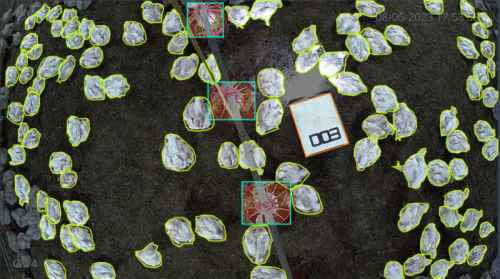
Resultados
Los registros muestran que el movimiento del robot induce un desplazamiento gradual de los animales por fuera de la transecta del recorrido, generando una reducción de la ocupación de la zona. El máximo desplazamiento se observó en la primer semana donde hubo una reducción (70-90% ) del número de pichones en la zona recorrida con respecto al minuto anterior al paso del robot. Los controles
(equivalente en tiempo y espacio pero sin paso de robots) mostraron cambios en la ocupación a través del tiempo entre un 20 y 50%. El fenómeno de desplazamiento inducido por el robot continuó siendo evidente a las 5 semanas de edad (35-75% y 0- 20%, robot y control, respectivamente). En ambas edades estos porcentajes de ocupación reducida se mantiene en los 4 minutos posteriores al paso del robot.
Discusión
Se observa que el movimiento del robot induce aun a las 5 semanas de edad desplazamientos por fuera de la transecta del recorrido, dejando despoblada parcialmente dicha área de forma temporal. Se propone por lo tanto profundizar sobre la dinámica del desplazamiento de los animales y el tiempo de demora en la repoblación del área que había sido despejada. Este desplazamiento temporal de
los animales además podría favorecer el aireado de la cama llevando a un impacto positivo en los parámetros de bienestar que estarían influenciados por la calidad del ambiente, como por ej. estado del plumaje en la zona ventral, dermatitis plantar y el nivel de afección de los codos. También para evaluar si existe una relación entre el recorrido del robot, el desplazamiento y la productividad de los animales se
proponen estudios de indicadores productivos (i.e. masa corporal, tasa de conversión). Los resultados obtenidos, si bien preliminares, sugieren que la implementación del Robot AviSense tiene un impacto positivo en el bienestar induciendo una mayor actividad ambulatoria. Se profundizarán los estudios
abarcando otros indicadores de bienestar y productividad.
Bibliografía
- Bienestaranimal.eu. (2011). Listado de leyes de la UE sobre Bienestar Animal [Online]. http://bienestaranimal.eu
- Santos MN et al. (2022). In pursuit of a better broiler: tibial morphology, breaking strength, and ash content in conventional and slower-growing strains of broiler chickens. Poultry Science, 101(4), 101755.
- SENASA. (2022). Servicio Nacional de Sanidad y Calidad AgroalimentariaBienestar Animal [Online]- Avaliable: http://www.senasa.gob.ar/informacion/bienestaranimal.
- Shipov A et al. (2010). The influence of severe prolonged exercise restriction on the mechanical and structural properties of bone in an avian model. Veterinary Journal, 183(2), 153–160.